NovAtel Waypoint® Post-Processing
Waypoint® Post-Processing Software
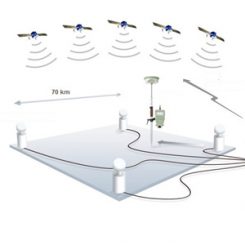
GNSS post-processing offers many advantages over a real-time operation. Precise real-time GNSS using RTK requires a robust data link for GNSS corrections data. If a real-time solution is not required, the raw GNSS measurement data can be collected in the field and processed post-mission to provide a precise position and velocity solution.
Post-processing allows for simplified real-time system operation without the need for real-time telemetry and allows lower-cost receiver hardware to be used.
GNSS/INS post-processing allows for greatly reduced solution drift when operating with limited GNSS availability. Combining and smoothing the trajectories computed forwards and backward in time results in an improvement in the position, velocity and accuracy available over what is available in real-time.
Ask us about how NovAtel is transitioning to offer cost-effective automotive grade products in volume.

GrafNav

GrafNav post-processing software is a powerful, highly configurable processing engine that allows for the best possible static or kinematic GNSS accuracy using all available GNSS data. Support of data formats from most single and multi-frequency commercial receivers means GrafNav will likely work with your existing hardware. A full suite of data and solution visualization and diagnostic tools is available for quality assurance. Precise satellite clock and orbit data can be downloaded from within GrafNav to achieve sub-10 cm position accuracy using PPP with kinematic trajectories.
Features
- Moving baseline processing: relative positioning and velocity between two kinematic antennas
- Heading determination between two fixed antennae on the same moving vehicle
- Improved accuracy through forward and reverse processing
- Static and kinematic processing
- Compatible with multiple receiver manufacturers for maximum flexibility
- Support for GPS L1/L2/L2C, GLONASS and BeiDou
Benefits
- Differential and Precise Point Positioning (PPP) processing
- Provides best possible position accuracy, down to the centimeter level
- Streamlined Project Wizard for quick startup
- Built-in processing profiles for airborne, ground and marine applications
- Support for multiple base stations Industry standards for GNSS post-processing
Inertial Explorer
Inertial Explorer® (IE) maximizes the performance of your GNSS/INS hardware by ensuring you get the position, velocity and attitude accuracy your application requires. The tightly coupled integration of GNSS and IMU data delivers precise results, even when lower grade inertial sensors are used. IE can produce results suitable for demanding applications such as mobile mapping, aerial and hydrographic surveying. IMU data from high-end Fibre Optic Gyro (FOG) or Ring Laser Gyro (RLG) IMUs, and from lower grade sensor technology such as Micro Electrical Mechanical Systems (MEMS) can be processed.
Features
- Full dual frequency GPS, GLONASS, BeiDou, Galileo and QZSS support within a differential processor
- Dual frequency GPS, GLONASS and BeiDou supported in PPP processor
- Support for up to 32 base stations
- Attitude corrections are automatically applied for the effect of the deflections of the vertical using a geopotential model of the Earth based on EGM2008
- Loosely and tightly coupled GNSS/INS processing
- Boresight module for solving angular offsets between IMU and camera frames
Benefits
- Easy integration with our SPAN® GNSS/INS products
- Streamlined Project Wizard for quick startup
- Single step GNSS and Inertial Measurement Unit (IMU) processing for efficient workflow
- Built-in processing profiles for airborne, ground and marine projects
- Support for multiple base stations
- Precise Point Positioning (PPP) processing